





Their innovation involves the development of an artificial paw equipped with sensing capabilities, aiming to enable robots to traverse various terrains like soil, sand, and grass without compromising stability or succumbing to obstacles. Described in a preprint paper on the arXiv server, this ‘Sensorized’ paw distinguishes different terrains and their properties by gauging the force exerted on its surface from the underlying ground.
Tejal Barnwal, Professor Kostas Alexis, and Jørgen Anker Olsen, authors of the paper, emphasized the significance of their prior research efforts in the DARPA Subterranean Challenge. The challenge, ultimately won by Team CERBERUS under the leadership of Professor Kostas Alexis, highlighted the critical need for a robust response to challenging terrains. The team, utilizing the legged robot ANYmal provided by their partners at ETH Zurich, played a pivotal role in their success in the competition. Recognizing the limitations of existing technology, the researchers concluded that augmenting a legged robot’s perception through sensorized paws could substantially enhance the reliability and adaptability of locomotion control.
Numerous prior studies consistently highlight the challenges faced by legged robots when navigating uneven and intricate terrains. These difficulties range from constrained movements to occlusions that impede effective environmental sensing. In response to these issues, roboticists and computer scientists in recent years have been actively working on developing computational methods. The goal is to enable legged robots to recognize diverse terrains and adjust their movements accordingly, ensuring optimal locomotion. However, many existing approaches rely on sensors embedded within the robots, such as LiDAR sensors and cameras. These sensors, while valuable, often provide a limited perspective of the surrounding environment and the terrain underfoot.
The authors, Barnwal, Olsen, and Alexis, underscore the significance of integrating information from sight, touch, and sound in both humans and animals. This multisensory approach, crucial for swift adaptation to diverse terrains, enhances spatial awareness, improves balance, and facilitates rapid decision-making for safe navigation in various environments. Applying a similar principle to quadrupeds by providing them with real-time sound-based terrain recognition and pressure information on foot exertion can prove beneficial. This approach assists these animals in maintaining balance and enables them to adapt their control and navigation strategies effectively across different terrain scenarios.
Barnwal, Olsen, Alexis, and collaborator Alexander Vangen embarked on a mission to devise an advanced system capable of real-time, detailed terrain assessment for moving robots. Their innovative solution, known as TRACEPaw, involves the development of an artificial paw or foot that seamlessly integrates at the base of a robotic leg.
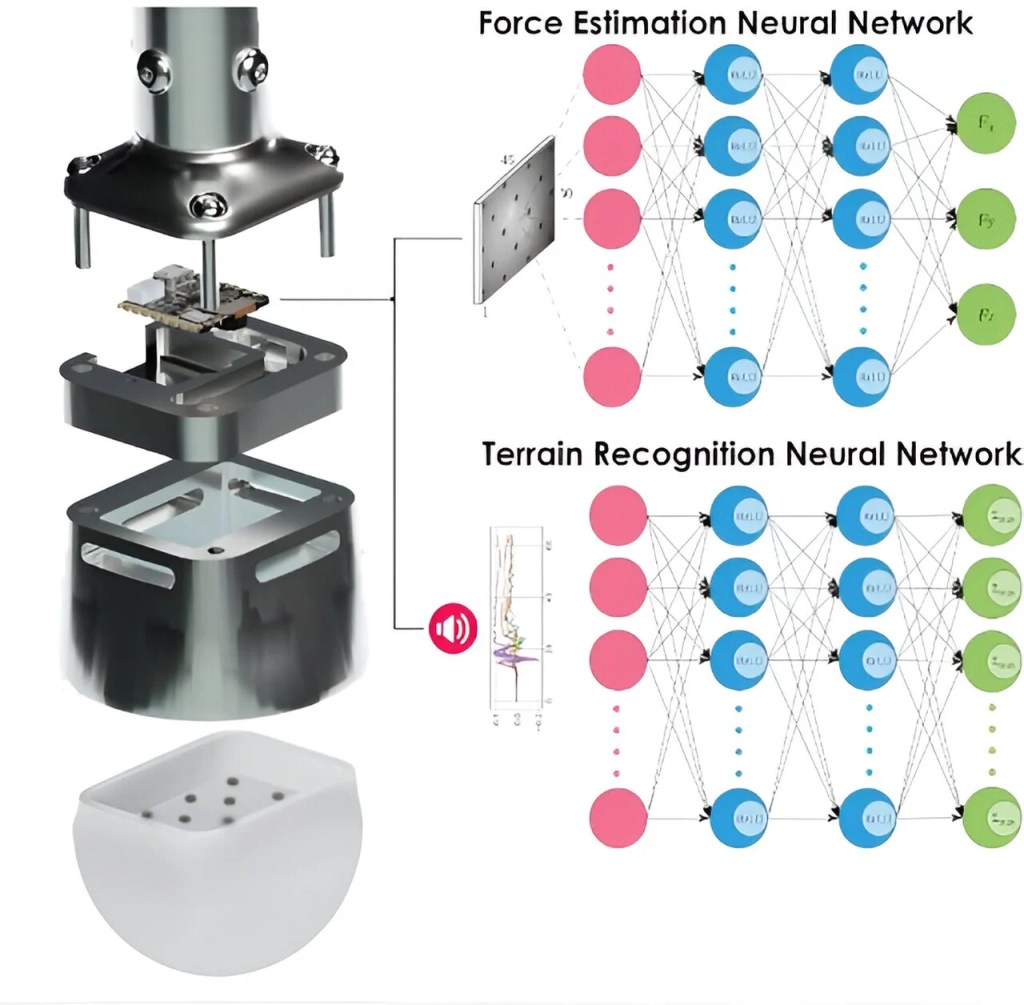
The researchers elucidated that TRACEPaw incorporates a silicone-based hemispherical point end-effector, leveraging silicon deformation, an embedded micro camera, and a microphone for instantaneous estimation of 3D force vectors and identification of diverse terrain types. This artificial paw’s end-effector reacts to contact forces by deforming, with an integrated micro camera capturing images of the deformed inner surface within the paw. Concurrently, a microphone captures audio signals during the interaction between the paw and the terrain.
The paw-like system devised by Barnwal, Olsen, Alexis, and Vangen gathers diverse sensory data from its surroundings, focusing on the terrain beneath it. Following this data collection, a computer vision model, trained through supervised learning, processes the information. This model can then make predictions regarding the nature of the terrain and estimate the contact force. These estimations are derived from analyzing the deformation of the silicon surface and the acoustic signals produced during interaction with the soil.
The researchers explained that the system utilizes uncomplicated yet effective supervised learning models. These models are designed for vision-based 3D force estimation, focusing on silicon deformation, and audio-based soil classification. This approach enables the system to conduct on-edge sensing, computing, and real-time inferencing.
Another notable benefit of the sensing system developed by this research team lies in its construction using off-the-shelf and easily accessible electronic components. This characteristic implies that the system could be produced on a larger scale with ease and cost-effectiveness.
Barnwal, Olsen, and Alexis highlighted that the sensorized paw was crafted using commonly available electronics and standard components. This design choice enhances the system’s accessibility, scalability, and simplicity of in-house fabrication. Such characteristics could, in turn, support the widespread adoption and replication of the technology.
The researchers conducted a series of experiments within a controlled laboratory environment to assess the performance of their system. Preliminary results were exceedingly positive, indicating that TRACEPaw has the potential to substantially improve the mobility and functionality of legged robots. This enhancement allows them to effectively identify and adapt to various terrains.
The researchers emphasized that their study demonstrates the effectiveness of on-edge computing within the paw, employing supervised learning models. This approach contributes to swift and reliable decision-making, ultimately enhancing the adaptability and responsiveness of the robot. Such capabilities are deemed crucial for navigating dynamic environments and preventing incidents like slipping or stumbling in unpredictable terrains.
Looking ahead, the artificial paw developed by Barnwal, Olsen, Alexis, and Vangen holds the potential to enable the deployment of legged robots in practical, real-world scenarios, such as search and rescue or exploration missions. Concurrently, the team aims to enhance their system by expanding the training dataset for its underlying algorithm. This iterative process is expected to enhance the precision of force estimation and soil classification capabilities.
The researchers outlined their future objectives, indicating a focus on enhancing the system’s environmental comprehension. This involves incorporating data from the on-board Inertial Measurement Unit (IMU) to provide insights into terrain slope and force direction in the Earth’s frame. Additionally, they plan to evaluate the system’s performance on more intricate, multi-classed diverse terrains. Ultimately, the researchers aim to integrate TRACEPaw with a physical legged robot to conduct a comprehensive evaluation of the integrated system’s performance in real-world scenarios.
Resources
- ONLINE NEWS Fadelli, I. & Tech Xplore. (2023, November 27). A sensing paw that could improve the ability of legged robots to move on different terrains. Tech Xplore. [Tech Xplore]
- JOURNAL Vangen, A., Barnwal, T., Olsen, J. L., & Alexis, K. (2023). Terrain Recognition and Contact Force Estimation through a Sensorized Paw for Legged Robots. arXiv (Cornell University). [arXiv.org]
Cite this page:
APA 7: TWs Editor. (2023, November 27). The Role of a Sensing Paw in Improving the Movement of Robots with Legs on Diverse Grounds. PerEXP Teamworks. [News Link]










