





APA 7: TWs Editor & ChatGPT. (2023aa, November 5). Reduced in Size: Miniaturized Robot Takes Inspiration from Spiders for Shape-Shifting Abilities. PerEXP Teamworks. [News Link]
Overseen by Kaushik Jayaram, an assistant professor in the Paul M. Rady Department of Mechanical Engineering, and Heiko Kabutz, a doctoral student, this research has earned recognition. Their efforts were acknowledged with the Best Paper Award in the field of Safety, Security, and Rescue Robotics at the 2023 International Conference on Intelligent Robots and Systems held in Detroit.
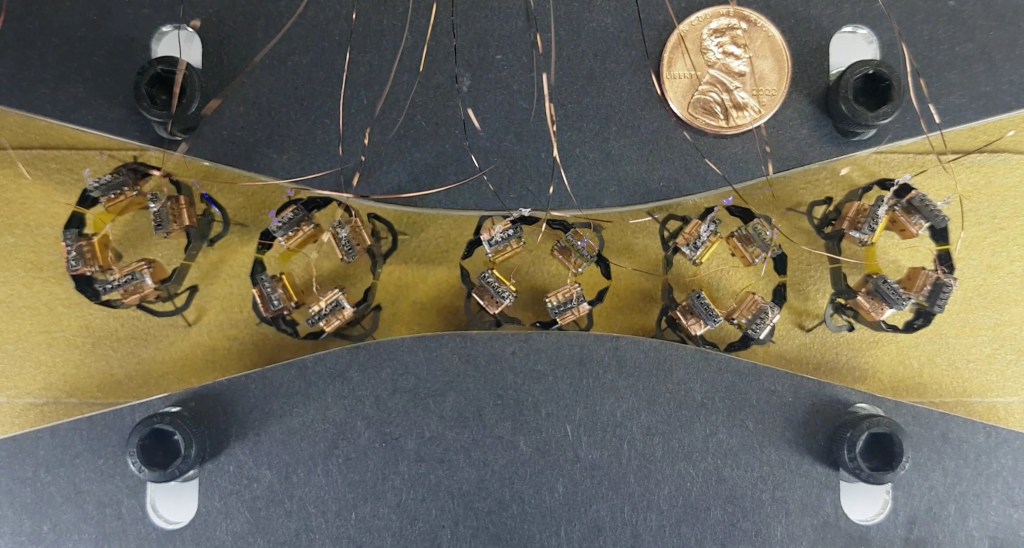
Building upon their prior work with the miniature shape-morphing robot known as CLARI, the team has introduced an even more compact and agile version, referred to as mCLARI. This diminutive robot outperforms its predecessor by enhancing its size and speed. It exhibits remarkable adaptability, enabling it to skillfully navigate cluttered environments by seamlessly transitioning from forward movement to lateral motion through shape-shifting, rather than conventional turning. This innovation holds the promise of providing valuable assistance to first responders in the aftermath of major disasters. The research represents a significant stride in Kaushik Jayaram’s group’s pursuit of developing insect-scale robots that can gracefully traverse natural terrains, akin to their biological counterparts. This is achieved through a harmonious blend of the adaptability seen in soft robots and the agility of rigid robots.
The most recent iteration of the robot exhibits significant downsizing, with a 60% reduction in length and a 38% decrease in mass. Remarkably, it manages to maintain approximately 80% of the actuation power compared to its predecessor. Furthermore, this newer version has surpassed its forerunner in terms of speed, achieving a remarkable pace of 60 millimeters per second, which equates to three times its body length covered each second. Similar to its predecessor, the robot showcases its versatility by being capable of locomoting in various shapes and employing multiple gaits at varying frequencies.
The recent achievement in miniaturization is a result of the innovative origami-based design and laminate fabrication technique initially employed by Jayaram and his team in the creation of the robot named HAMR-Jr. This unique approach empowers Jayaram and Kabutz to adjust the size of their robot design while retaining its mechanical agility, effectively bridging the gap between these robots and practical real-world applications. Such applications encompass tasks like inspecting and servicing valuable assets such as jet engines, where compact and adaptable robots are in demand.
The lead author of the recent study, Kabutz, possesses dexterous skills akin to those of a surgeon, enabling him to intricately construct and fold the minuscule leg modules of the robot. Kabutz’s lifelong fascination with robots, which began in his youth, led him to actively participate in robotic competitions during his high school years.
Kabutz expressed that his initial focus was on constructing larger robots. However, upon joining Jayaram’s lab, his interest shifted towards the creation of bioinspired robots on a scale comparable to insects.
Jayaram explained that the robots, with their deformable nature, offer the flexibility of being slightly larger in size, which in turn allows for carrying more weight and incorporating additional sensors. This results in extended lifespans and enhanced stability. However, when necessary, these robots can compress themselves to fit through tight spaces, like inspection access ports within a jet engine.

Within Jayaram’s research team, the focus lies in examining biological principles and translating them into practical applications for engineered systems. Their laboratory houses an array of robots inspired by the physical structures and functionalities of diverse arthropods, encompassing creatures such as cockroaches and spiders.
Jayaram emphasized their core fascination with comprehending the underlying reasons behind the physical characteristics and movements of animals. This intrigue drives their exploration into building bioinspired robots that can be harnessed to fulfill societal requirements, including tasks such as search and rescue missions, environmental surveillance, and even applications in surgical procedures.
Resources
- NEWSPAPER Strain, D. (2023, November 4). Spider-inspired, shape-changing robot now even smaller. Tech Xplore. [Tech Xplore]
- JOURNAL Kabutz, H., Hedrick, A., McDonnell, P., & Jayaram, K. (2023). mCLARI: a shape-morphing insect-scale robot capable of omnidirectional terrain-adaptive locomotion in laterally confined spaces. arXiv (Cornell University). [arXiv.org]











👋 Excellent post 💖 I am new follower. I hope follow my blog and GROW TOGETHER.
I hope you have a great and blessed day 🌈
A cordial greeting 👋🇪🇸
David López Moncada. PK 🌎