





APA 7: TWs Editor. (2023, November 18). Strategizing Robot Team Actions in Ambiguous Environments: An Adaptive Approach. PerEXP Teamworks. [News Link]
Over the past few years, there has been a concerted effort among computer scientists to create frameworks and models aimed at enhancing the problem-solving capabilities of robots beyond controlled laboratory environments. The objective is to equip robots with computational tools that enable them to navigate and overcome unanticipated challenges, ultimately paving the way for their seamless integration into real-world scenarios and the successful accomplishment of diverse missions.
Johns Hopkins University researchers have unveiled a novel framework geared towards orchestrating the actions of robotic teams, with a unique emphasis on factoring in the inherent uncertainties of their operational environments. This innovative approach, detailed in a pre-published paper on arXiv, extends from a computational method initially introduced in their earlier research endeavors.
Addressing the fundamental challenge of planning under uncertainty in the field of robotics, researchers led by Cora A. Dimmig and Kevin C. Wolfe, alongside their colleagues, highlight the increased complexity faced by multi-robot teams. As the number of robots grows, the planning problem becomes computationally intractable. In response to this challenge, the team introduces an innovative approach for planning under uncertainty specifically tailored for heterogeneous multi-robot teams.
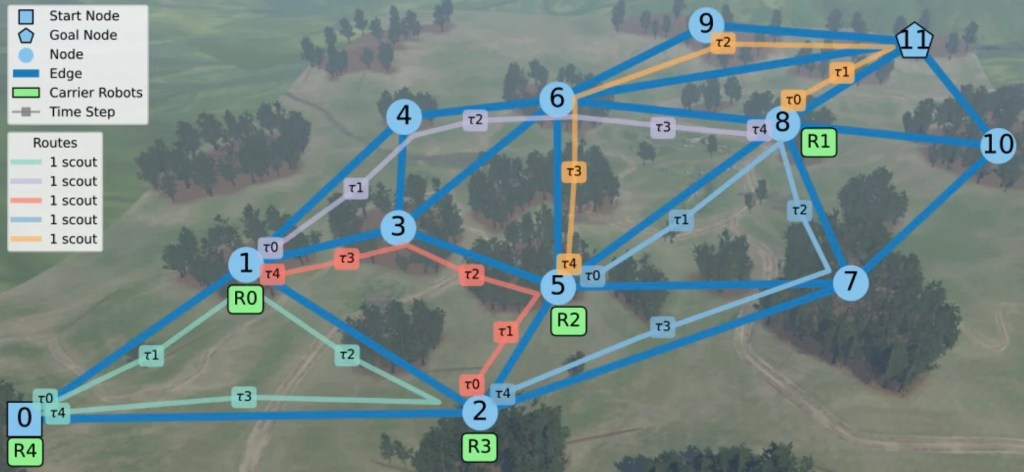
Dimmig, Wolfe, and their research collaborators present an approach applicable to situations where diverse robots within a team assume distinct roles to collaboratively achieve a shared mission in outdoor environments. The core concept involves designating certain robots, characterized by higher speeds, as scouts during real-world missions. These scouts take on the task of patrolling unfamiliar or uncertain geographic areas in advance, aiming to identify potential challenges and enhance the overall planning of actions for the entire robot team.
The researchers elucidated in their paper that this approach allows for a dual investigation—firstly, planning aimed at minimizing the risk linked to uncertainties in proposed paths, and secondly, planning geared towards reducing the overall uncertainty within the environment.
Dimmig, Wolfe, and their team have presented a method for orchestrating the actions of robot teams, grounded in two primary programming strategies— the construction of a dynamic topological graph and the utilization of mixed-integer programming. Their methodology incorporates the deployment of two distinct categories of robots. The initial type is assigned mission-oriented tasks, while the second type functions as scouts, exploring environments to gather data and mitigate uncertainty, thereby streamlining the accomplishment of tasks.
To date, the researchers have computationally assessed their methodology across a spectrum of potential scenarios introducing uncertainty in real-world missions. Encouragingly, their results indicate the potential of the proposed approach to enhance the efficacy of robot teams in tasks characterized by diverse levels of uncertainty.
In their study, the researchers conduct rigorous testing of their approach across various representative scenarios. These scenarios involve the movement of a robot team through environments with the primary objective of minimizing detection, particularly in the face of uncertain observer positions. Their experimentation reveals that the proposed approach maintains computational tractability, enabling real-time re-planning in dynamic environments. Furthermore, the findings demonstrate its capacity to enhance performance under conditions of imperfect information and its adaptability to different risk profiles.
Moving forward, the innovative approach crafted by Dimmig, Wolfe, and their collaborators holds promise for extensive testing, encompassing both simulated environments and physical robots to affirm its practical viability. Furthermore, this recent advancement may serve as a catalyst for inspiring other research teams to explore comparable methodologies, aiming to elevate the efficiency of robots in intricate real-world settings and, in turn, advancing their widespread integration.
Resources
- NEWSPAPER Fadelli, I. & Tech Xplore. (2023, November 18). An approach to plan the actions of robot teams in uncertain conditions. Tech Xplore. [Tech Xplore]
- JOURNAL Dimmig, C. A., Wolfe, K., Kobilarov, M., & Moore, J. O. (2023). Uncertainty-Aware Planning for Heterogeneous Robot Teams using Dynamic Topological Graphs and Mixed-Integer Programming. arXiv (Cornell University). [arXiv.org]











